Disparity calculation using Iterative Lucas-Kanade - Cylinder wake
Description
Disparity calculation using optical flow registration technique, Iterative Lucas-Kanade [source].
Setup
Packages
[1]:
%reload_ext autoreload
%autoreload 2
[2]:
import matplotlib.pyplot as plt
import numpy as np
import os
import pivuq
Load images
[3]:
parent_path = "./data/cylinder_wake/"
image_pair = np.array(
[plt.imread(os.path.join(parent_path + ipath)).astype("float") for ipath in ["frameA.tif", "frameB.tif"]]
)
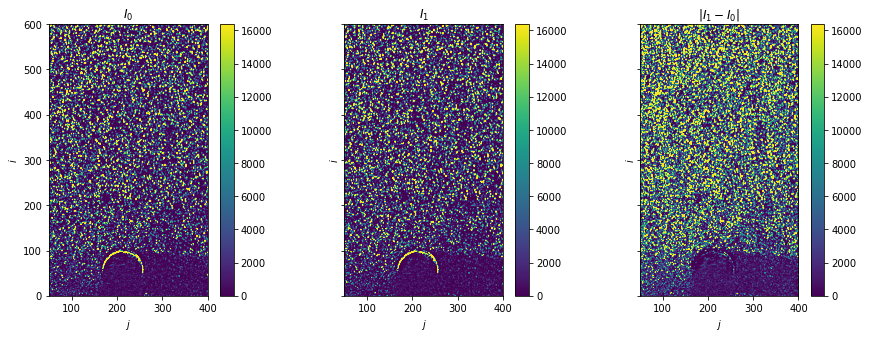
Plot raw images
[4]:
fig, axes = plt.subplots(ncols=3, sharex=True, sharey=True, figsize=(15, 5))
for i, ax in enumerate(axes[:2]):
im = ax.imshow(image_pair[i], vmax=2**14)
fig.colorbar(im, ax=ax)
ax.set(title=f"$I_{i}$")
ax = axes[-1]
im = ax.imshow(np.abs(image_pair[1] - image_pair[0]), vmin=0, vmax=2**14)
fig.colorbar(im, ax=ax)
ax.set(title="$|I_1 - I_0|$")
for ax in axes:
ax.set(xlim=(50, 400), ylim=(0, 600), xlabel="$j$", ylabel="$i$")
Load reference data
[5]:
ref = {}
PIV
[6]:
data = np.loadtxt(os.path.join(parent_path + "vectors_PIV.dat"), skiprows=3).T
I, J = 75, 42
ref["PIV"] = {
"X": np.reshape(data[0], (I, J)) - 1, # zero-index,
"Y": np.reshape(data[1], (I, J)) - 1,
"U": np.stack((np.reshape(data[2], (I, J)), np.reshape(data[3], (I, J)))),
}
OF
[7]:
data = np.load(os.path.join(parent_path + "vectors_OF.npz"))
ref["OF"] = {
"X": data["X"], # already zero-indexed
"Y": data["Y"],
"U": data["U"], # u, v
}
Disparity calculation
[8]:
err = {"PIV": {}, "OF": {}}
PIV
[9]:
%%time
err["PIV"]["X"], err["PIV"]["Y"], err["PIV"]["D"] = pivuq.disparity.ilk(
image_pair,
ref["PIV"]["U"],
window_size=16,
window="gaussian",
velocity_upsample_kind="linear",
warp_direction="center",
warp_order=1,
warp_nsteps=1,
)
CPU times: user 6.48 s, sys: 80 ms, total: 6.56 s
Wall time: 6.58 s
OF
[10]:
%%time
err["OF"]["X"], err["OF"]["Y"], err["OF"]["D"] = pivuq.disparity.ilk(
image_pair,
ref["OF"]["U"],
window_size=16,
window="gaussian",
velocity_upsample_kind="linear",
warp_direction="center",
warp_order=1,
warp_nsteps=1,
)
CPU times: user 6.34 s, sys: 44.8 ms, total: 6.38 s
Wall time: 6.4 s
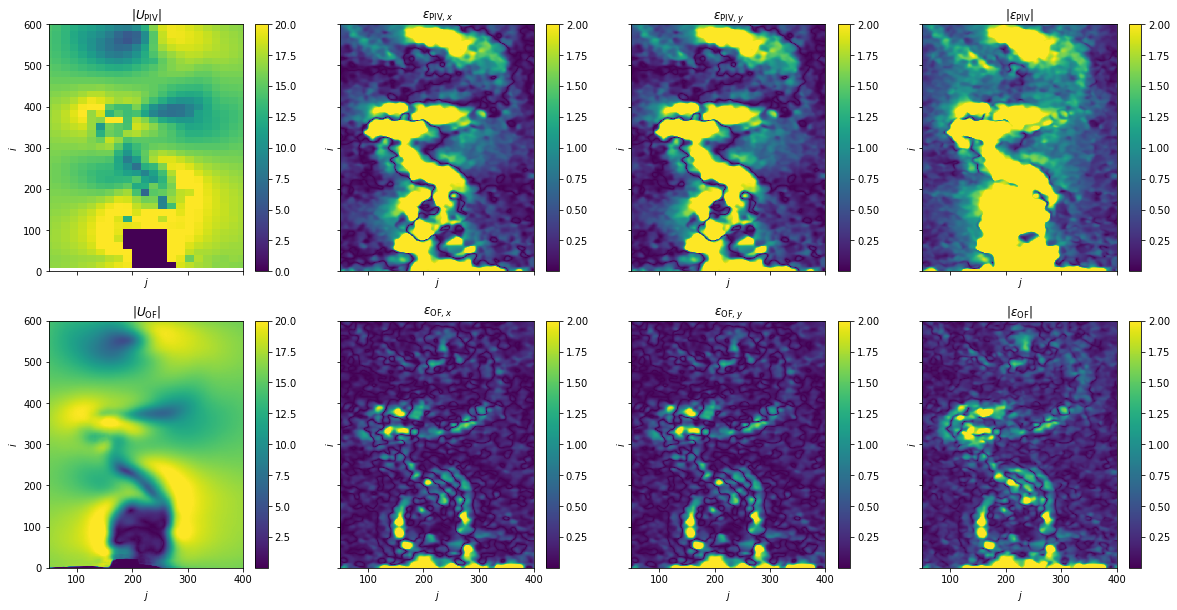
Plot: Disparity map - PIV vs. OF
[11]:
fig, axes = plt.subplots(nrows=2, ncols=4, sharex=True, sharey=True, figsize=(20, 10))
for i, case in enumerate(["PIV", "OF"]):
ax = axes[i, 0]
im = ax.pcolormesh(ref[case]["X"], ref[case]["Y"], np.linalg.norm(ref[case]["U"], axis=0), vmax=20)
fig.colorbar(im, ax=ax)
ax.set(title=rf"$|U_{{\mathrm{{{case}}}}}|$")
for j, (ax, var) in enumerate(
zip(
axes[i, 1:4],
[
rf"\epsilon_{{\mathrm{{{case}}},x}}",
rf"\epsilon_{{\mathrm{{{case}}},y}}",
],
)
):
im = ax.pcolormesh(err[case]["X"], err[case]["Y"], err[case]["D"][i], vmax=2)
fig.colorbar(im, ax=ax)
ax.set(title=f"${var}$")
ax = axes[i, 3]
im = ax.pcolormesh(err[case]["X"], err[case]["Y"], np.linalg.norm(err[case]["D"], axis=0), vmax=2)
fig.colorbar(im, ax=ax)
ax.set(title=rf"$|\epsilon_{{\mathrm{{{case}}}}}|$")
for ax in axes.ravel():
ax.set(xlim=(50, 400), ylim=(0, 600), xlabel="$j$", ylabel="$i$")